
The pocket navigation system offers the advantage that the sensor can be located in the front pocket of the trousers. No additional fastening is required unless the trousers are loose enough that the movement of the smartphone in your pocket is completely decoupled from the movement of your leg.
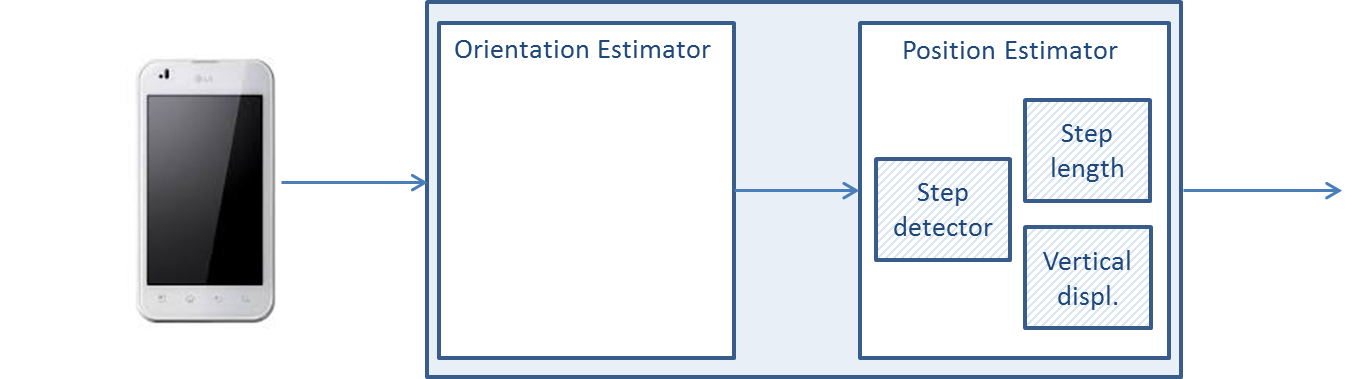
The hardware subsystem refers to the smartphone and the software subsystem, represented in the figure with the outer box, to the source code. The software subsystem has two main parts, the orientation estimation algorithm and the position estimation algorithm. The inputs of the software subsystem are measurements of the smartphone and the output is your position.
The hardware subsystem, your smartphone, uses special sensors to measure the movement of your leg. In the Hardware section you will find a deep explanation of the sensors you need to know: the inertial and the magnetic sensors.
In the Software section you will find a more detailed explanation of the two main algorithms that form the pocket navigation system.